- Research
- Open access
- Published:
Relation-theoretic coincidence and common fixed point results under \((F,\mathcal{R})_{g}\)-contractions with an application
Fixed Point Theory and Applications volume 2019, Article number: 12 (2019)
Abstract
In this paper, we begin with some observations on F-contractions. Thereafter, we introduce the notion of \((F,\mathcal{R})_{g}\)-contractions and utilize the same to prove some coincidence and common fixed point results in the setting of metric spaces endowed with binary relations. An example is also given to exhibit the utility of our results. We also deduce some consequences in the setting of ordered metric spaces. As an application, we investigate the existence and uniqueness of a solution of integral equation of Volterra type.
1 Introduction and preliminaries
The celebrated principle, namely Banach contraction principle, is one of the pivotal results of nonlinear analysis. It establishes that, given a complete metric space \((M,d)\) and a self-mapping T on M, if there exists \(h\in (0,1)\) such that \(d(Tx,Ty)\leq hd(x,y)\) for all \(x,y\in M\), then T has a unique fixed point z in M. Moreover, \(\lim_{n\to \infty }T^{n}x=z\) for all \(x\in M\), where \(T^{n}\) (\(n \geq 1\)) is the n-times composition of T. This principle is a very popular tool for guaranteeing the existence and uniqueness of solutions for considerable problems arising in several branches of mathematics. Banach contraction has been extended and generalized in many directions (see [16, 18, 20, 23, 25, 28, 31, 36, 37] and the references therein). In this respect, Ran and Reurings [31] and Nieto and Rodriguez–Lopez [25, 26] extended the Banach contraction principle in a very interesting way by showing that if the metric space is endowed with an ordered binary relation, then it is enough to assume that the contraction condition holds only for those comparable elements. Recently, this branch of fixed point theory has been developed through many research works (e.g., Bhaskar and Lakshmikantham [5], Ben-El-Mechaiekh [4], Samet and Turinici [33], and Imdad et al. [3, 11, 13,14,15, 19, 24]). Here it can be pointed out that the first result concerning coincidence point was reported in Machuca [22], which was further improved by Goebel [10], while Jungck [17] proved the first ever common fixed point theorem in 1976.
On the other hand, several authors, such as Boyd and Wong [6], Browder [7], Wardowski [37], Jleli and Samet [16], and several others, generalized the Banach contraction principle by employing various types of control functions. In this regard, Wardowski [37] in 2012 introduced the notion of F-contractions as follows.
Definition 1.1
([37])
Let \(\mathbb{F}\) be a family of all functions \(F:(0,\infty )\to \mathbb{R}\) which satisfy the following conditions:
- (\(F_{1}\)):
-
F is strictly increasing;
- (\(F_{2}\)):
-
For every sequence \(\{\beta _{n}\}\subset (0,\infty )\),
$$ \lim_{n\to \infty }\beta _{n}=0 \quad \textit{if and only if } \lim_{n\to \infty }F(\beta _{n})=-\infty ; $$ - (\(F_{3}\)):
-
There exists \(k\in (0,1)\) such that \(\lim_{\beta \to 0^{+}}\beta ^{k}F(\beta )=0\).
Throughout this work, the family of all continuous functions which satisfy \((F_{2})\) is denoted by \(\mathcal{F}\).
Example 1.1
The following functions \(F: (0,\infty )\to \mathbb{R}\) belong to \(\mathcal{F}\):
-
(i)
\(F(\beta )=\ln \beta \);
-
(ii)
\(F(\beta )=\beta -\frac{1}{\beta } \);
-
(iii)
\(F(\beta )= \ln (\frac{\beta }{3}+\sin \beta )\).
Definition 1.2
([37])
Let \((M,d)\) be a metric space. A mapping \(T:M\to M\) is said to be an F-contraction if there exist \(\tau >0\) and \(F\in \mathbb{F}\) such that
Theorem 1.1
([37])
Every F-contraction mapping T defined on a complete metric space \((M,d)\) has a unique fixed point (say z). Moreover, for any \(x\in M\), the sequence \(\{T^{n}x\}\) converges to z.
It was remarked that (see [37]) the monotonicity of F implies that every F-contraction mapping is contractive and hence continuous. Secelean [35] observed that the continuity of an F-contraction can be obtained from condition \((F_{2})\). In view of these observations, the proof of Theorem 1.1 can be done without condition \((F_{1})\). Piri and Kumam [27] replaced condition \((F_{3})\) by assuming the continuity of F and proved a theorem, analogous to Wardowski’s, which can also be proved without condition \((F_{1})\). Durmaz et al. [9] proved order-theoretic fixed point results using F-contraction. Sawangsup et al. [34] introduced the notion of \(F_{R}\)-contraction and utilized the same to prove some relation-theoretic fixed point results. Imdad et al. [15] introduced the notion of \((F, \mathcal{R})\)-contraction as follows.
Definition 1.3
([15])
Let \((M,d)\) be a metric space and \(\mathcal{R}\) be a binary relation on M. A mapping \(T:M\to M\) is said to be an \((F, \mathcal{R})\)-contraction if there exist \(\tau >0\) and \(F\in \mathcal{F}\) such that
where \(x\mathcal{R}^{\nshortparallel }y\) means \((x,y)\in \mathcal{R}\) and \(x\neq y\).
Under some suitable assumptions (see [15]) Imdad et al. proved that every \((F,\mathcal{R})\)-contraction mapping possesses a unique fixed point.
On the other hand, Wardowski and Dung [38] used the same class of auxiliary functions given in Definition 1.1 to introduce the notion of F-weak contractions as follows.
Definition 1.4
([38])
Let \((M,d)\) be a metric space. A mapping \(T:M\to M\) is said to be an F-weak contraction if there exist \(\tau >0\) and \(F\in \mathbb{F}\) such that (for all \(x,y \in M\))
where \(m(x,y)=:\max \{d(x,y),d(x,Tx),d(y,Ty), \frac{d(x,Ty)+d(y,Tx)}{2}\}\).
Wardowski and Dung [38] proved the following theorem.
Theorem 1.2
Let \((M,d)\) be a complete metric space and \(T:M\to M\) be an F-weak contraction. If F or T is continuous, then
-
(a)
T has a unique fixed point (say \(z\in M\)),
-
(b)
\(\lim_{n\to \infty } T^{n}x=z\) for all \(x\in M\).
We observe that Theorem 1.2 can survive without assumptions \((F_{1})\) and \((F_{3})\) besides removing one way implication of assumption \((F_{2})\).
For the sake of completeness, we collect here some basic definitions and fundamental results needed in our subsequent discussions.
From now on, \(\mathbb{N}\) is the set of natural numbers and \(\mathbb{N}_{0}=\{0\} \cup \mathbb{N}\). We write \(\{x_{n}\} \to x\) whenever \(\{x_{n}\}\) converges to x. In the sequel, M stands for a nonempty set and \(T,g: M \to M\). For the sake of brevity, we write Tx instead of \(T(x)\).
A point \(x \in M\) is said to be:
-
fixed point of T if \(Tx=x\) (\(\operatorname{Fix}(T)\) denotes the set of all such points);
-
coincidence point of \((T,g)\) if \(Tx=gx\) (\(\operatorname{Coin}(T,g)\) stands for the set of all such points);
-
common fixed point of \((T,g)\) if \(x=Tx=gx\).
Recall that the pair \((T,g)\) is commuting on M if \(Tgx=gTx\) for all \(x \in M\) and weakly compatible if \(Tgx=gTx\) for all \(x \in \operatorname{Coin}(T,g)\). The pair \((T,g)\) is called compatible if \(\lim_{n\to \infty }d(gTx_{n},Tgx_{n})=0\), whenever \(\{x_{n}\}\) is a sequence in M such that \(\lim_{n\to \infty }gx_{n}=\lim_{n\to \infty }Tx_{n}\). The mapping T is called g-continuous at a point \(x\in M\) if for all \(\{x_{n}\}\subseteq M\), \(\{gx_{n}\}\to gx \) implies \(\{Tx_{n}\}\to Tx\).
In this paper, we introduce the notion of \((F,\mathcal{R})_{g}\)-contractions and utilize the same to prove some coincidence and common fixed point results in the setting of related metric spaces. An example is given to exhibit the utility of our results. Some consequences in the setting of ordered metric spaces are also obtained. Our results extend and generalize many results of the existing literature (e.g., [1, 10, 17, 31, 37]). As an application, we investigate the existence and uniqueness of a solution of integral equation of Volterra type. Finally, we provide two examples to exhibit the utility of our application.
2 Relation theoretic notions and auxiliary results
A nonempty subset \(\mathcal{R}\) of \(M\times M\) is said to be a binary relation on M. Trivially, \(M\times M\) is a binary relation on M known as the universal relation. For simplicity, we will write \(x\mathcal{R}y\) whenever \((x,y) \in \mathcal{R}\) and write \(x\mathcal{R}^{\nshortparallel }y\) whenever \(x\mathcal{R}y\) and \(x\neq y\). Observe that \(\mathcal{R}^{\nshortparallel }\) is also a binary relation on M and \(\mathcal{R}^{\nshortparallel } \subseteq \mathcal{R}\). The elements x and y of M are said to be \(\mathcal{R}\)-comparable if \(x\mathcal{R}y\) or \(y\mathcal{R}x\), this is denoted by \([x,y]\in \mathcal{R}\).
A binary relation \(\mathcal{R}\) on M is said to be:
-
reflexive if \(x\mathcal{R}x\) for all \(x \in M\);
-
transitive if, for any \(x, y, z \in M\), \(x\mathcal{R}y\) and \(y\mathcal{R}z\) imply \(x\mathcal{R}z\);
-
antisymmetric if, for any \(x, y \in M\), \(x\mathcal{R}y\) and \(y\mathcal{R}x\) imply \(x=y\);
-
preorder if it is reflexive and transitive;
-
partial order if it is reflexive, transitive, and antisymmetric.
Let M be a nonempty set, \(\mathcal{R}\) be a binary relation on M, and \(E\subseteq M\). Then the restriction of \(\mathcal{R}\) to E is denoted by \(\mathcal{R}\arrowvert _{E}\) and is defined by \(\mathcal{R} \cap E^{2}\). The inverse of \(\mathcal{R}\) is denoted by \(\mathcal{R} ^{-1}\) and is defined by \(\mathcal{R}^{-1}=\{(u,v)\in M\times M: (v,u) \in \mathcal{R}\}\) and \(\mathcal{R}^{s}=\mathcal{R}\cup \mathcal{R} ^{-1}\).
Definition 2.1
([1])
Let M be a nonempty set and \(\mathcal{R}\) be a binary relation on M. A sequence \(\{x_{n}\}\subseteq M\) is said to be an \(\mathcal{R}\)-preserving sequence if \(x_{n} \mathcal{R}x_{n+1}\) for all \(n\in \mathbb{N}_{0}\).
Definition 2.2
([1])
Let M be a nonempty set and \(T:M\to M\). A binary relation \(\mathcal{R}\) on M is said to be T-closed if for all \(x,y\in M\), \(x\mathcal{R}y\) implies \(Tx\mathcal{R}Ty\).
Definition 2.3
([2])
Let M be a nonempty set and \(T,g:M\to M\). A binary relation \(\mathcal{R}\) on M is said to be \((T,g)\)-closed if for all \(x,y\in M\), \(gx\mathcal{R}gy\) implies \(Tx\mathcal{R}Ty\).
Definition 2.4
([2])
Let \((M,d)\) be a metric space and \(\mathcal{R}\) be a binary relation on M. We say that M is \(\mathcal{R}\)-complete if every \(\mathcal{R}\)-preserving Cauchy sequence in M converges to a limit in M.
Remark 2.1
Every complete metric space is \(\mathcal{R}\)-complete, whatever the binary relation \(\mathcal{R}\). Particularly, under the universal relation, the notion of \(\mathcal{R}\)-completeness coincides with the usual completeness.
Definition 2.5
([2])
Let \((M,d)\) be a metric space, \(\mathcal{R}\) be a binary relation on M, \(T:M\to M\), and \(x\in M\). We say that T is \(\mathcal{R}\)-continuous at x if, for any \(\mathcal{R}\)-preserving sequence \(\{x_{n}\}\subseteq M\) such that \(\{x_{n}\}\to x\), we have \(\{Tx_{n}\}\to Tx\). Moreover, T is called \(\mathcal{R}\)-continuous if it is \(\mathcal{R}\)-continuous at each point of M.
Remark 2.2
Every continuous mapping is \(\mathcal{R}\)-continuous, whatever the binary relation \(\mathcal{R}\). Particularly, under the universal relation, the notion of \(\mathcal{R}\)-continuity coincides with the usual continuity.
Definition 2.6
([2])
Let \((M,d)\) be a metric space, \(\mathcal{R}\) be a binary relation on M, \(T,g:M\to M\), and \(x\in M\). We say that T is \((g,\mathcal{R})\)-continuous at x if, for any sequence \(\{x_{n}\}\subseteq M\) such that \(\{gx_{n}\}\) is \(\mathcal{R}\)-preserving and \(\{gx_{n}\}\to gx\), we have \(\{Tx_{n}\} \to Tx\). Moreover, T is called \((g,\mathcal{R})\)-continuous if it is \((g,\mathcal{R})\)-continuous at each point of M.
Observe that on setting \(g=I\), Definition 2.6 reduces to Definition 2.5.
Remark 2.3
Every g-continuous mapping is \((g,\mathcal{R})\)-continuous, whatever the binary relation \(\mathcal{R}\). Particularly, under the universal relation, the notion of \((g,\mathcal{R})\)-continuity coincides with the usual g-continuity.
Definition 2.7
([2])
Let \((M,d)\) be a metric space, \(\mathcal{R}\) be a binary relation on M, and \(T,g:M\to M\). We say that the pair \((T,g)\) is \(\mathcal{R}\)-compatible if for any sequence \(\{x_{n}\} \subseteq M\) such that \(\{Tx_{n}\}\) and \(\{gx_{n}\}\) are \(\mathcal{R}\)-preserving and \(\lim_{n\to \infty }gx_{n}= \lim_{n\to \infty }Tx_{n}=x\in M\), we have \(\lim_{n\to \infty }d(gTx _{n},Tgx_{n})=0\).
Remark 2.4
Every compatible pair is \(\mathcal{R}\)-compatible, whatever the binary relation \(\mathcal{R}\). Particularly, under the universal relation, the notion of \(\mathcal{R}\)-compatibility coincides with the usual compatibility.
Definition 2.8
([1])
Let \((M,d)\) be a metric space. A binary relation \(\mathcal{R}\) on M is said to be d-self-closed if for any \(\mathcal{R}\)-preserving sequence \(\{x_{n}\}\subseteq M\) such that \(\{x_{n}\}\to x\), there exists a subsequence \(\{x_{n_{k}}\}\) of \(\{x_{n}\}\) such that \([x_{n_{k}},x]\in \mathcal{R}\) for all \(k\in \mathbb{N}_{0}\).
Definition 2.9
([21])
For \(x,y \in X\), a path of length p (\(p \in \mathbb{N}\)) in \(\mathcal{R}\) from x to y is a finite sequence \(\{u_{0}, u_{1}, \ldots, u_{p}\}\subseteq X\) such that \(u_{0}=x\), \(u_{p}=y\) and \((u_{i}, u_{i+1}) \in \mathcal{R}\) for each \(i \in \{0,1, \ldots, p-1\}\).
Definition 2.10
([2])
A subset \(E\subseteq X\) is said to be \(\mathcal{R}\)-connected if, for each \(x,y \in E\), there exists a path in \(\mathcal{R}\) from x to y.
The following lemmas are needed in the sequel.
Lemma 2.1
Let \((M, d)\) be a metric space and \(\{x_{n}\}\) be a sequence in M. If \(\{x_{n}\}\) is not Cauchy in M, then there exist \(\epsilon >0\) and two subsequences \(\{x_{n(k)}\}\) and \(\{x_{m(k)}\}\) of \(\{x_{n}\}\) such that
Moreover, if \(\{x_{n}\}\) is such that \(\lim_{n\to \infty }d(x_{n},x _{n+1})=0\), then
Lemma 2.2
([12])
Let M be a nonempty set and \(g:M\to M\). Then there exists a subset \(E\subseteq M\) such that \(g(E)=g(M)\) and \(g:E\to E\) is one–one.
3 Main results
We begin this section by introducing the notion of \((F,\mathcal{R})_{g}\)-contractions as follows.
Definition 3.1
Let \((M,d)\) be a metric space and \(T,g:M\to M\). Then T is said to be an \((F, \mathcal{R})_{g}\)-contraction if there exists \(\tau >0\) such that
where \(F:(0,\infty )\to \mathbb{R}\) is a continuous mapping satisfying \((F_{2})\).
The following proposition is immediate due to the symmetricity of the metric d.
Proposition 3.1
Let \((M,d)\) be a metric space endowed with a binary relation \(\mathcal{R}\) and \(T,g:M \to M\). Then, for each continuous mapping \(F:(0, \infty )\to \mathbb{R}\) satisfying \((F_{2})\), the following are equivalent:
-
(a)
for all \(x,y\in M\) such that \((gx,gy) \in \mathcal{R}\) and \((Tx,Ty)\in \mathcal{R}\),
$$ \tau + F\bigl(d(Tx, Ty)\bigr)\leq F\bigl(d(gx,gy)\bigr); $$ -
(b)
for all \(x,y\in M\) such that either \((gx,gy),(Tx,Ty) \in \mathcal{R}\) or \((gy,gx),(Ty,Tx)\in \mathcal{R}\),
$$ \tau + F\bigl(d(Tx, Ty)\bigr)\leq F\bigl(d(gx,gy)\bigr). $$
Now, we are equipped to state and prove our main result on the existence of coincidence points as follows.
Theorem 3.1
Let \((M,d)\) be a metric space endowed with a transitive binary relation \(\mathcal{R}\) and \(T,g:M\to M\). Assume that the following conditions are fulfilled:
-
(a)
there exists \(x_{0}\in M\) such that \(gx_{0}\mathcal{R}Tx _{0}\);
-
(b)
\(\mathcal{R}\) is \((T,g)\)-closed;
-
(c)
T is an \((F,\mathcal{R})_{g}\)-contraction;
-
(d)
- \((\mathrm{d}_{1})\) :
-
there exists a subset X of M such that \(T(M)\subseteq X \subseteq g(M)\) and X is \(\mathcal{R}\)-complete;
- \((\mathrm{d}_{2})\) :
-
one of the following conditions is satisfied:
-
(i)
T is \((g,\mathcal{R})\)-continuous; or
-
(ii)
T and g are continuous; or
-
(iii)
\(\mathcal{R}\arrowvert _{X}\) is d-self closed provided (3.1) holds for all \(x,y \in M\) with \(gx\mathcal{R}gy\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\);
-
(i)
or alternatively
- \((\mathrm{d}^{\prime })\) :
-
- \((\mathrm{d}^{\prime }_{1})\) :
-
there exists a subset Y of M such that \(T(M)\subseteq g(M)\subseteq Y\) and Y is \(\mathcal{R}\)-complete;
- \((\mathrm{d}^{\prime }_{2})\) :
-
\((T,g)\) is an \(\mathcal{R}\)-compatible pair;
- \((\mathrm{d}^{\prime }_{3})\) :
-
T and g are \(\mathcal{R}\)-continuous.
Then the pair \((T,g)\) has a coincidence point.
Proof
Observe that in both cases (d) and \((\mathrm{d}^{\prime })\), we have \(T(M)\subseteq g(M)\). In view of assumption (a), we have \(gx_{0} \mathcal{R}Tx_{0}\). If \(Tx_{0}=gx_{0}\), then \(x_{0}\) is a coincidence point of \((T,g)\) and there is nothing to prove. Assume that \(Tx_{0}\neq gx_{0}\), then from the fact that \(T(M)\subseteq g(M)\), one can find \(x_{1}\in M\) such that \(gx_{1}=Tx_{0}\). Similarly, there is \(x_{2}\in M\) such that \(gx_{2}=Tx_{1}\). Inductively, one can contract a sequence \(\{x_{n}\}\subseteq M\) such that
Claim: \(\{gx_{n}\}\) is an \(\mathcal{R}\)-preserving sequence, that is,
We prove this claim by induction. Now, using (3.2) with \(n=0\) and condition (a), we have \(gx_{0}\mathcal{R}gx_{1}\), which shows that (3.3) is true for \(n=0\). Assume that (3.3) is true for \(n=k\geq 1\), that is, \(gx_{k}\mathcal{R}gx_{k+1}\). As \(\mathcal{R}\) is \((T,g)\)-closed, we have \(Tx_{k}\mathcal{R}Tx_{k+1}\), which yields that \(gx_{k+1}\mathcal{R}gx _{k+2}\). Hence, by induction, (3.3) holds for all \(n\in \mathbb{N}_{0}\). In view of (3.2) and (3.3), we obtain that the sequence \(\{Tx_{n}\}\) is also \(\mathcal{R}\)-preserving, that is,
Now, if \(Tx_{n_{0}}=Tx_{n_{0}+1}\) for some \(n_{0}\in \mathbb{N}_{0}\), then \(x_{n_{0}}\) is a coincidence point of \((T,g)\) and we are done. Assume that \(Tx_{n}\neq Tx_{n+1}\) for all \(n\in \mathbb{N}_{0}\). On using (3.2), (3.3), (3.4), and condition (c), we have
Let \(\beta _{n}=d(gx_{n},gx_{n+1})\). Using (3.5) and condition (c), we have (for all \(n\in \mathbb{N}\))
Now, letting \(n \to \infty \) in this inequality, we obtain \(\lim_{n\to \infty }F(\beta _{n})=-\infty \) which together with \((F_{2})\) implies that
Next, we show that \(\{gx_{n}\}\) is a Cauchy sequence via contradiction. To do so, assume that \(\{gx_{n}\}\) is not Cauchy. Then Lemma 2.1 and equation (3.6) guarantee the existence of \(\epsilon >0\) and two subsequences \(\{gx_{n(k)}\}\) and \(\{gx_{m(k)}\}\) of \(\{gx_{n}\}\) such that \(k\leq n(k) \leq m(k)\), \(d(gx _{n(k)}, gx_{m(k)-1})\leq \epsilon < d(gx_{n(k)}, gx_{m(k)})\) for all \(k \in \mathbb{N}_{0}\) and
This yields that there exists \(k_{0}\in \mathbb{N}_{0}\) such that \(d(gx_{n(k)-1}, gx_{m(k)-1})>0\) for all \(k\geq k_{0}\). As \(\mathcal{R}\) is transitive, we obtain \(gx_{n(k)-1}\mathcal{R}^{\nshortparallel }gx_{m(k)-1}\) and \(Tx_{n(k)-1}\mathcal{R}^{\nshortparallel } Tx_{m(k)-1}\) for all \(k\geq k_{0}\). Applying condition (c), we have
As F is continuous, on letting \(k \to \infty \) in (3.8) and using (3.7), we obtain \(\tau + F(\epsilon )\leq F(\epsilon )\), a contradiction. Hence, \(\{gx_{n}\}\) is a Cauchy sequence.
Assume that condition (d) is satisfied. Due to (3.2), we have \(\{gx_{n}\}\subseteq T(M)\). Therefore, \(\{gx_{n}\}\) is an \(\mathcal{R}\)-preserving Cauchy sequence in X. Using condition \((\mathrm{d}_{1})\) (\(\mathcal{R}\)-completeness of X), there exists \(y\in X\) such that \(\{gx_{n}\}\to y\). As \(X\subseteq g(M)\), there exists \(u\in M\) such that \(y=gu\). Hence, on using (3.2), we obtain
Now, we show that u is a coincidence point of \((T,g)\) considering the three alternative cases using condition \((\mathrm{d}_{2})\). Firstly, assume that T is \((g,\mathcal{R})\)-continuous. Using (3.3) and (3.9), we obtain
On using (3.9) and (3.10), we have
Hence, u is a coincidence point of \((T,g)\).
Secondly, assume that both T and g are continuous. Owing to Lemma 2.2, there exists a subset \(E\subseteq M\) such that \(g(E)=g(M)\) and \(g:E\to E\) is one–one. Define \(f:g(E)\to g(M)\) by
As \(g:E\to M\) is one-one and \(T(M)\subseteq g(M)\), f is well-defined. Owing to the continuity of T and g, it follows that f is also continuous. Now, using the fact that \(g(M)=g(E)\), condition \((\mathrm{d}_{1})\) reduces to \(T(M)\subseteq X \subseteq g(E)\) so that, without loss of generality, we can choose \(\{x_{n}\}\subseteq E\) and \(u\in E\). Using (3.9), (3.11), and the continuity of f, we obtain
Hence, u is a coincidence point of \((T,g)\).
Thirdly, assume that \(\mathcal{R}\arrowvert _{X}\) is d-self-closed and (3.1) holds for all \(x,y \in M\) with \(gx\mathcal{R}gy\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\). As \(\{gx_{n}\}\subseteq X\), \(\{gx_{n}\}\) is \(\mathcal{R}\arrowvert _{X}\)-preserving (due to (3.3)) and \(\{gx_{n}\}\to gu\) (due to (3.9)) so that there exists a subsequence \(\{gx_{n_{k}}\}\subseteq \{gx_{n}\}\) such that
Using (3.12) and condition (b), we have
Now, let \(P=\{k\in \mathbb{N}:Tx_{n_{k}}=Tu\}\). If P is infinite, then \(\{Tx_{n_{k}}\}\) has a subsequence \(\{Tx_{n_{k_{i}}}\}\) such that \(Tx_{n_{k_{i}}}=Tu\) for all \(i\in \mathbb{N}\). This implies that \(\lim_{i\to \infty }Tx_{n_{k_{i}}}=Tu\). As \(\lim_{n\to \infty }Tx_{n}=gu\) (due to (3.9)), we obtain \(Tu=gu\). Now, if P is finite, then \(\{Tx_{n_{k}}\}\) has a subsequence \(\{Tx_{n_{k_{i}}}\}\) such that \(Tx_{n_{k_{i}}}\neq Tu\) for all \(i\in \mathbb{N}\). From (3.12), (3.13) and as \(Tx_{n_{k_{i}}}\neq Tu\) for all \(i\in \mathbb{N}\), we have
and
Now, using (3.14), (3.15), Proposition 3.1, and the fact that (3.1) holds for all \(x,y \in M\) with \(gx\mathcal{R}gy\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\), we obtain
Making use of (3.9), \((F_{2})\) and letting \(i\to \infty \), we obtain
Using (3.9) and (3.16), we get
Hence, in both cases u is a coincidence point of \((T,g)\).
Alternatively, assume that condition \((\mathrm{d}^{\prime })\) holds. Then \(\{gx_{n}\}\subseteq Y\) and, hence, \(\{gx_{n}\}\) is an \(\mathcal{R}\)-preserving Cauchy sequence in Y. The \(\mathcal{R}\)-completeness of Y implies that there exists \(v\in Y\) such that
On using (3.2) and (3.17), we have
Now, using (3.3), (3.17), and condition \((\mathrm{d}^{\prime }_{3})\), we have
Again, using (3.4), (3.18), and condition \((\mathrm{d}^{\prime }_{3})\), we get
As \(\{Tx_{n}\}\) and \(\{gx_{n}\}\) are \(\mathcal{R}\)-preserving (due to (3.3) and (3.4)) and \(\lim_{n\to \infty } Tx_{n}= \lim_{n\to \infty } gx_{n}=v\) (due to (3.17) and (3.18)), on using condition \((\mathrm{d}^{\prime }_{2})\), we obtain
Now, we will show that v is a coincidence point of \((T,g)\). Using (3.3), (3.17), and the \(\mathcal{R}\)-continuity of T, we obtain
From (3.20), (3.21), and (3.22), we have
Hence, v is a coincidence point of \((T,g)\). This completes the proof. □
Next, we present a corresponding uniqueness result of Theorem 3.1.
Theorem 3.2
If, in addition to hypotheses (a)–(d) of Theorem 3.1, we assume that, for all distinct coincidence points \(u,v\in \operatorname{Coin}(T, g)\), gu and gv are \(\mathcal{R}\)-comparable and one of T and g is one-one, then \((T,g)\) has a unique coincidence point.
Proof
In view of Theorem 3.1, the set \(\operatorname{Coin}(T,g)\) is nonempty. Let \(u,v\in \operatorname{Coin}(T,g)\), then \([gu,gv]\in \mathcal{R}\). Now, as \(Tu=gu\), \(Tv=gv\), and \([gu,gv]\in \mathcal{R}\), we have \([Tu,Tv] \in \mathcal{R}\). If \(gu=gv\), then we have \(Tu=gu=gv=Tv\), and hence \(u=v\) as one of T and g is one-one. Otherwise, using Proposition 3.1 and condition (c), we obtain
a contradiction. Therefore, \((T,g)\) has a unique coincidence point. □
Now, we present a common fixed point result as follows.
Theorem 3.3
If, in addition to the hypotheses of Theorem 3.2, we assume that \((T,g)\) is a weakly compatible pair, then the pair \((T, g)\) has a unique common fixed point.
Proof
Theorem 3.2 guarantees the existence of a unique coincidence point of the pair \((T, g)\); let u be such a point, and let \(z\in M\) be such that \(z = Tu = gu\). As T and g are weakly compatible, we have \(Tz = Tgu = gTu = gz\). Thus, z is a coincidence point of T and g. As u is unique, we must have \(u = z\). Therefore, u is a common fixed point of \((T, g)\) which is indeed unique (in view of the uniqueness of the coincidence point of \((T, g)\)). This completes the proof. □
The following example shows the utility of our results.
Example 3.1
Let \(M=(0, \infty )\) be endowed with the usual metric. Consider the sequence \(\{\pi _{n}\}\subseteq M\) which is defied by \(\pi _{n}= \frac{n(n+1)(n+2)}{3}\) for all \(n \geq 1\). Define a binary relation \(\mathcal{R}\) on M by \(\mathcal{R}=\{(\pi _{1}, \pi _{1}), (\pi _{i}, \pi _{i+1}): i\geq 1\}\). Define \(T,g: M\to M\) as follows:
and
Then, for F given in Example 1.1 (ii), T is an \((F, \mathcal{R})_{g}\)-contraction mapping with \(\tau = 6\). Observe that if \(gx\mathcal{R}^{\nshortparallel }gy\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\), then \(x=\pi _{i}\), \(y=\pi _{i+1}\) for some \(i \in \mathbb{N}-\{1 \}\). Further, for all \(n,m \in \mathbb{N}\) such that \(m>n>1\), we have
Therefore, \(6+F(d(Tx, Ty))\leq F(d(gx,gy))\) for all \(x,y \in X\) such that \(gx\mathcal{R}^{\nshortparallel }gy\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\). Hence, T is an \((F, \mathcal{R})_{g}\)-contraction. Moreover, by a routine calculation one can show that all the hypotheses of Theorem 3.3 are satisfied. Observe that \((T,g)\) has a unique common fixed point (namely \(\pi _{1}\)).
On setting \(g=I\) in Theorem 3.3, we deduce the following corresponding fixed point result.
Theorem 3.4
Let \((M,d)\) be a metric space endowed with a transitive binary relation \(\mathcal{R}\) and \(T:M\to M\). Assume that the following conditions are fulfilled:
-
(a)
there exists \(x_{0}\in M\) such that \(x_{0}\mathcal{R}Tx _{0}\);
-
(b)
\(\mathcal{R}\) is T-closed;
-
(c)
T is \((F,\mathcal{R})\)-contraction;
-
(d)
- \((\mathrm{d}_{1})\) :
-
there exists a subset X of M such that \(T(M)\subseteq X\) and X is \(\mathcal{R}\)-complete;
- \((\mathrm{d}_{2})\) :
-
one of the following holds:
-
(i)
T is \(\mathcal{R}\)-continuous; or
-
(ii)
\(\mathcal{R}\arrowvert _{X}\) is d-self-closed provided (1.1) holds for all \(x,y\in M\) with \(x\mathcal{R}y\) and \(Tx\mathcal{R}^{\nshortparallel }Ty\).
-
(i)
Then T has a fixed point. Moreover, if
-
(e)
\(u,v\in \operatorname{Fix}(T)\) implies that \([u,v]\in \mathcal{R}\),
then T has a unique fixed point.
The following result presents a weaker assumption to guarantee the uniqueness of the fixed point.
Theorem 3.5
If condition (e) of Theorem 3.4 is replaced by the following:
- \((\mathrm{e}^{\prime })\) :
-
\(\operatorname{Fix}(T)\) is \(\mathcal{R}^{s}\)-connected,
then the fixed point of T is unique.
Proof
On the contrary, let us assume that there exist \(u,v \in \operatorname{Fix}(T)\) such that \(u\neq v\). Then there exists a path in \(\mathcal{R}^{s}\) (say \(\{u_{0},u_{1},\ldots,u_{p}\}\subseteq \operatorname{Fix}(T)\)) of some finite length p from u to v (with \(u_{i}\neq u_{i+1}\) for each i (\(0 \leq i\leq k-1\)), otherwise \(u=v\), a contradiction) so that
Since \(u_{i} \in \operatorname{Fix}(T)\), so that \(Tu_{i}=u_{i}\) for each \(i \in \{0,1, \ldots, p\}\). Using the fact that T is an \((F,\mathcal{R})\)-contraction mapping, we obtain \(\tau + F(u_{i}, u_{i+1})\leq F(u_{i}, u_{i+1})\) for all i \((0\leq i\leq k-1)\), which is a contradiction. This finishes the proof. □
4 Some consequences in ordered metric spaces
Recall that a triplet \((M,d,\preceq )\) is called an ordered metric space if \((M,d)\) is a metric space and \((M,\preceq )\) is an ordered set. By \(x\prec y\) we mean that \(x\preceq y\) and \(x\neq y\).
Definition 4.1
([8])
Let \((M,\preceq )\) be an ordered set and \(T,g:M\to M\). Then T is said to be g-increasing if, for any \(x,y\in M\), \(gx\preceq gy\) implies that \(Tx\preceq Ty\).
Remark 4.1
Observe that the notion T is g-increasing is equivalent to saying that ⪯ is \((T,g)\)-closed.
On setting \(\mathcal{R}=\preceq \) in Theorems 3.1–3.3 and using Remark 4.1, we deduce the following result.
Corollary 4.1
Let \((M,d,\preceq )\) be an ordered metric space and \(T,g:M\to M\). Assume that the following conditions are fulfilled:
-
(a)
there exists \(x_{0}\in M\) such that \(gx_{0}\preceq Tx_{0}\);
-
(b)
T is g-increasing;
-
(c)
there exist \(\tau >0\) and a continuous function F satisfying \((F_{2})\) such that
$$ \tau + F\bigl(d(Tx, Ty)\bigr)\leq F\bigl(d(gx,gy)\bigr) \quad \textit{for all } x,y \in M \textit{ with } gx\prec gy \textit{ and } Tx \prec Ty; $$ -
(d)
there exists a subset X of M such that \(T(M)\subseteq X \subseteq g(M)\) and X is ⪯-complete;
-
(e)
either T is \((g,\preceq )\)-continuous or T and g are continuous;
then the pair \((T,g)\) has a coincidence point. If, in addition, we assume that
-
(f)
for all distinct coincidence points \(u,v\in \operatorname{Coin}(T, g)\), Tu and gv are ⪯-comparable,
then \((T,g)\) has a unique coincidence point. Furthermore, if T and g are weakly compatible, then the pair \((T, g)\) has a unique common fixed point.
On setting \(\mathcal{R}=\,\preceq \) in Theorem 3.4 and using Remark 4.1, we deduce the following result.
Corollary 4.2
Let \((M,d,\preceq )\) be an ordered metric space and \(T:M\to M\). Assume that the following conditions are fulfilled:
-
(a)
there exists \(x_{0}\in M\) such that \(x_{0}\preceq Tx_{0}\);
-
(b)
T is ⪯-increasing;
-
(c)
there exist \(\tau >0\) and a continuous function F satisfying \((F_{2})\) such that
$$ \tau + F\bigl(d(Tx, Ty)\bigr)\leq F\bigl(d(x,y)\bigr) \quad \textit{for all } x,y \in M \textit{ with } x\prec y \textit{ and } Tx \prec Ty; $$ -
(d)
there exists a subset X of M such that \(T(M)\subseteq X\) and X is ⪯-complete;
-
(e)
T is ⪯-continuous.
Then T has a fixed point. Moreover, if
-
(f)
\(u,v\in \operatorname{Fix}(T)\) implies that \([u,v]\in \,\preceq \),
then T has a unique fixed point.
5 Application to integral equations
In this section, we show the applicability of Theorem 3.5 by investigating the existence and uniqueness of a solution for the following integral equation of Volterra type:
where \(K:[0,1]\times [0,1]\times [0,1]\to [0,1]\) and \(f:[0,1]\to [0,1]\).
Consider the Banach space \(M=C([0,1],[0,1])\) of all continuous functions \(x:[0,1]\to [0,1]\) equipped with norm
Define a metric d on M by \(d(x,y)=\|x-y\|\) for all \(x,y \in M\). Then \((M,d)\) is a complete metric space.
The following definitions are needed in the sequel.
Definition 5.1
A lower solution for (5.1) is a function \(\alpha \in M\) such that
Definition 5.2
An upper solution for (5.1) is a function \(\beta \in M\) such that
Now, we are equipped to state and prove our results in this section which run as follows.
Theorem 5.1
Assume that K is nondecreasing in the third variable and there exists \(\tau >0\) such that
for all \(s,v\in [0,1]\) and \(x,y\in M\). Then the existence of a lower solution of the integral equation (5.1) ensures the existence and uniqueness of a solution of (5.1).
Proof
Consider the operator \(T:M\to M\) defined by
Observe that x is a fixed point of the operator T if and only if it is a solution of the integral equation (5.1).
Define a binary relation \(\mathcal{R}\) on M by
For any \((x,y)\in \mathcal{R}\), we have (for all \(s\in [0,1]\))
which shows that \((Tx,Ty)\in \mathcal{R}\). Therefore, \(\mathcal{R}\) is T-closed.
Next, let \((x,y)\in \mathcal{R}\) and consider
This implies that
which on taking supremum (over both the sides) gives rise
or
that is,
or
Thus, inequality (3.1) is satisfied with \(F(\alpha )=\frac{-1}{\alpha }\), \(\alpha >0\).
Now, choose an \(\mathcal{R}\)-preserving sequence \(\{x_{n}\}\) in \(C([0,1]\) such that \(\{x_{n}\}\to x\) for some \(x\in C([0,1]\). Then we have (for all \(s\in [0,1]\))
which implies that \(x_{n}(s)\leq x(s)\) for all \(s\in [0,1]\). Thus, \(\mathcal{R}\) is d-self-closed on \(C([0,1]\). Finally, if \(x,y\in \operatorname{Fix}(T)\), then \(z=\max \{x,y\}\in C([0,1]\). As \(x\leq z\) and \(y\leq z\), \(x\mathcal{R}z\) and \(y\mathcal{R}z\) so that condition \((\mathrm{e}^{\prime })\) of Theorem 3.5 holds. Therefore, all the assumptions of Theorem 3.5 are satisfied. Hence, the result is established. □
Next, we provide the following theorem in the presence of an upper solution.
Theorem 5.2
Assume that K is nonincreasing in the third variable and there exists \(\tau >0\) such that
for all \(s,v\in [0,1]\) and \(x,y\in M\). Then the existence of an upper solution of the integral equation (5.1) ensures the existence and uniqueness of a solution of (5.1).
Proof
Define a binary relation \(\mathcal{R}\) on M as follows:
Now, following steps of the proof of Theorem 5.1 with an analogous procedure, one can check that all the hypotheses of Theorem 3.5 are validated. Therefore, in this analogous case Theorem 3.5 ensures the existence of a unique solution of the integral equation (5.1). □
Finally, to exhibit the utility of Theorems 5.2 and 5.1, we adopt the following examples.
Example 5.1
The function \(x(s)=\frac{1}{2}s\), \(s\in [0,1]\) is a solution in M for the following integral equation:
Proof
Define the operator \(T:M\to M\) as
Now, set \(K(s,v,x(v))=\ln (1+x(v))\), \(f(s)=\frac{3}{2}s-(1+s)\ln (1+s)\), and \(\tau \leq 0.01\). Observe that
-
the function \(K(s,v,x(v))=\ln (1+x(v))\) is nondecreasing in the third variable.
-
\(\frac{s}{2}\leq \frac{3}{2}s-(1+s)\ln (1+s)+\int _{0}^{s}\ln (1+x(v)) \,dv\), \(s\in [0,1]\) so that \(x(s)=\frac{s}{2}\) is a lower solution for (5.4).
-
in view of its graph (see Fig. 1), the following inequality holds true for all \(x,y\in [0,1]\):
$$ \bigl\vert \ln (1+x)-\ln (1+y) \bigr\vert \leq \frac{ \vert x-y \vert }{1+0.01 \vert x-y \vert }. $$(5.5)Using the nondecreasing function \(s\mapsto \frac{s}{1+0.01s}\), we have
$$ \bigl\vert \ln (1+x)-\ln (1+y) \bigr\vert \leq \frac{ \vert x-y \vert }{1+0.01 \vert x-y \vert } \leq \frac{ \max_{s\in [0,1]} \vert x-y \vert }{1+0.01\max_{s\in [0,1]} \vert x-y \vert }= \frac{ \Vert x-y \Vert }{1+0.01 \Vert x-y \Vert }. $$Figure 1 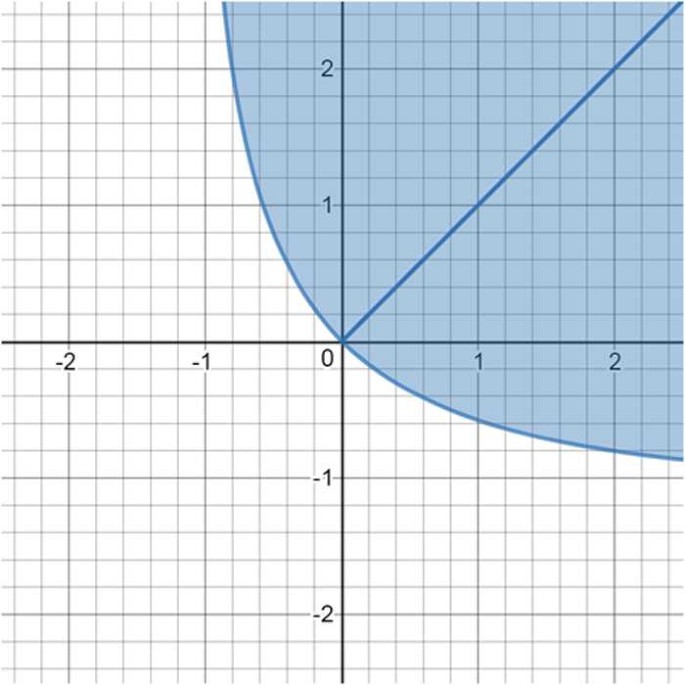
Inequality (5.5)

Hence, all the conditions of Theorem 5.1 are satisfied. Therefore, we conclude that the integral equation (5.4) has a unique solution (namely \(x(s)=\frac{1}{2}s\)). □
Example 5.2
The function \(x(s)=s\), \(s\in [0,1]\) is a solution in M for the following integral equation:
Proof
In view of its graph (see Fig. 2), the following inequality holds true for all \(x,y\in [0,1]\):
Using a similar argument as in Example 5.1, one can show that all the hypotheses of Theorem 5.2 are satisfied. Hence, the integral equation (5.6) has a unique solution (namely \(x(s)=s\)).

Inequality (5.7)
□
References
Alam, A., Imdad, M.: Relation-theoretic contraction principle. J. Fixed Point Theory Appl. 17(4), 693–702 (2015)
Alam, A., Imdad, M.: Relation-theoretic metrical coincidence theorems. Filomat (2017) arXiv:1603.09159 [math.FA]
Alfaqih, W.M., Gubran, R., Imdad, M.: Coincidence and common fixed point results under generalized \((\mathcal{A}; \mathcal{S})_{f}\)-contractions. Filomat 32(7), 2651–2666 (2018)
Ben-El-Mechaiekh, H.: The Ran–Reurings fixed point theorem without partial order: a simple proof. J. Fixed Point Theory Appl. 1(16), 373–383 (2014)
Bhaskar, T.G., Lakshmikantham, V.: Fixed point theorems in partially ordered metric spaces and applications. Nonlinear Anal., Theory Methods Appl. 65(7), 1379–1393 (2006)
Boyd, D.W., Wong, J.S.: On nonlinear contractions. Proc. Am. Math. Soc. 20, 458–464 (1969)
Browder, F.E.: On the convergence of successive approximations for nonlinear functional equations. Proc. K. Ned. Akad. Wet., Ser. A, Indag. Math. 71, 27–35 (1968)
Ćirić, L.B., Cakić, N., Rajović, M., Ume, J.S.: Monotone generalized nonlinear contractions in partially ordered metric spaces. Fixed Point Theory Appl. 2008, 131294 (2008)
Durmaz, G., Mınak, G., Altun, I.: Fixed points of ordered F-contractions. Hacet. J. Math. Stat. 45(1), 15–21 (2016)
Goebel, K.: A coincidence theorem. Bull. Acad. Pol. Sci., Sér. Sci. Math. Astron. Phys. 16, 733–735 (1968)
Gubran, R., Imdad, M., Khan, I.A., Alfaqih, W.M.: Order-theoretic common fixed point results for F-contractions. Bull. Math. Anal. Appl. 10(1), 80–88 (2018)
Haghi, R., Rezapour, S., Shahzad, N.: Some fixed point generalizations are not real generalizations. Nonlinear Anal., Theory Methods Appl. 74(5), 1799–1803 (2011)
Imdad, M., Alfaqih, W.M.: A relation-theoretic expansion principle. Acta Univ. Apulensis 54, 55–69 (2018)
Imdad, M., Alfaqih, W.M., Khan, I.A.: Weak θ-contractions and some fixed point results with applications to fractal theory. Adv. Differ. Equ. 2018, 439 (2018)
Imdad, M., Khan, Q., Alfaqih, W.M., Gubran, R.: A relation theoretic \(({F},\mathcal{R})\)-contraction principle with applications to matrix equations. Bull. Math. Anal. Appl. 10(1), 1–12 (2018)
Jleli, M., Samet, B.: A new generalization of the Banach contraction principle. J. Inequal. Appl. 2014, 38 (2014)
Jungck, G.: Commuting mappings and fixed points. Am. Math. Mon. 83, 261–263 (1976)
Kadelburg, Z., Radenovič, S.: Notes on some recent papers concerning F-contractions in b-metric spaces. Constr. Math. Anal. 1(2), 108–112 (2018)
Kadelburg, Z., Radenovič, S., Shukla, S.: Boyd–Wong and Meir–Keeler type theorems in generalized metric spaces. J. Adv. Math. Stud. 9(1), 83–93 (2016)
Kirk, W., Srinivasan, P., Veeramani, P.: Fixed points for mappings satisfying cyclical contractive conditions. Fixed Point Theory 4(1), 79–89 (2003)
Kolman, B., Busby, R.C., Ross, S.: Discrete Mathematical Structures, 3rd edn. PHI Pvt. Ltd., New Delhi (2000)
Machuca, R.: A coincidence theorem. Am. Math. Mon. 74, 5 (1967)
Matkowski, J.: Fixed point theorems for mappings with a contractive iterate at a point. Proc. Am. Math. Soc. 62(2), 344–348 (1977)
Mustafa, Z., Huang, H., Radenovič, S.: Some remarks on the paper “Some fixed point generalizations are not real generalizations”. J. Adv. Math. Stud. 9(1), 110–116 (2016)
Nieto, J.J., Rodríguez-López, R.: Contractive mapping theorems in partially ordered sets and applications to ordinary differential equations. Order 22(3), 223–239 (2005)
Nieto, J.J., Rodríguez-López, R.: Existence and uniqueness of fixed point in partially ordered sets and applications to ordinary differential equations. Acta Math. Sin. Engl. Ser. 23(12), 2205–2212 (2007)
Piri, H., Kumam, P.: Some fixed point theorems concerning F-contraction in complete metric spaces. Fixed Point Theory Appl. 2014, 210 (2014)
Radenovič, S., Kadelburg, Z.: Generalized weak contractions in partially ordered metric spaces. Comput. Math. Appl. 60(6), 1776–1783 (2010)
Radenovič, S., Kadelburg, Z., Jandrlič, D., Jandrlič, A.: Some results on weakly contractive maps. Bull. Iran. Math. Soc. 38(3), 625–645 (2012)
Radenovič, S., Vetro, F., Vujaković, J.: An alternative and easy approach to fixed point results via simulation functions. Demonstr. Math. 50(1), 223–230 (2017)
Ran, A.C., Reurings, M.C.: A fixed point theorem in partially ordered sets and some applications to matrix equations. Proc. Am. Math. Soc. 1435–1443 (2004)
Roldán, A., Martínez-Moreno, J., Roldán, C., Karapınar, E.: Multidimensional fixed-point theorems in partially ordered complete partial metric spaces under (ψ–ϕ)-contractivity conditions. Abstr. Appl. Anal. 2013, 634371 (2013)
Samet, B., Vetro, C., Vetro, P.: Fixed point theorems for α–ψ-contractive type mappings. Nonlinear Anal., Theory Methods Appl. 75(4), 2154–2165 (2012)
Sawangsup, K., Sintunavarat, W., de Hierro, A.F.R.L.: Fixed point theorems for \(F_{\mathcal{R}}\)-contractions with applications to solution of nonlinear matrix equations. J. Fixed Point Theory Appl. 1–15 (2016)
Secelean, N.: A weak F-contractions and some fixed point results. Bull. Iran. Math. Soc. 42, 779–798 (2016)
Shukla, S., Radenović, S., Kadelburg, Z.: Some fixed point theorems for ordered F-generalized contractions in 0-f-orbitally complete partial metric spaces. Theory Appl. Math. Comput. Sci. 4(1), 87–98 (2014)
Wardowski, D.: Fixed points of a new type of contractive mappings in complete metric spaces. Fixed Point Theory Appl. 2012, 94 (2012)
Wardowski, D., Van Dung, N.: Fixed points of F-weak contractions on complete metric spaces. Demonstr. Math. 47(1), 146–155 (2014)
Acknowledgements
All the authors are very grateful to the anonymous referees for their excellent suggestions, which greatly improved the presentation of the paper.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All the authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
All the authors declare that they have no competing interests.
Additional information
Abbreviations
Not applicable.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Alfaqih, W.M., Imdad, M., Gubran, R. et al. Relation-theoretic coincidence and common fixed point results under \((F,\mathcal{R})_{g}\)-contractions with an application. Fixed Point Theory Appl 2019, 12 (2019). https://doi.org/10.1186/s13663-019-0662-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13663-019-0662-7